HFSM bureau d’études électronique et mécanique est ravi de vous présenter une partie de son activité de 2020-2021.
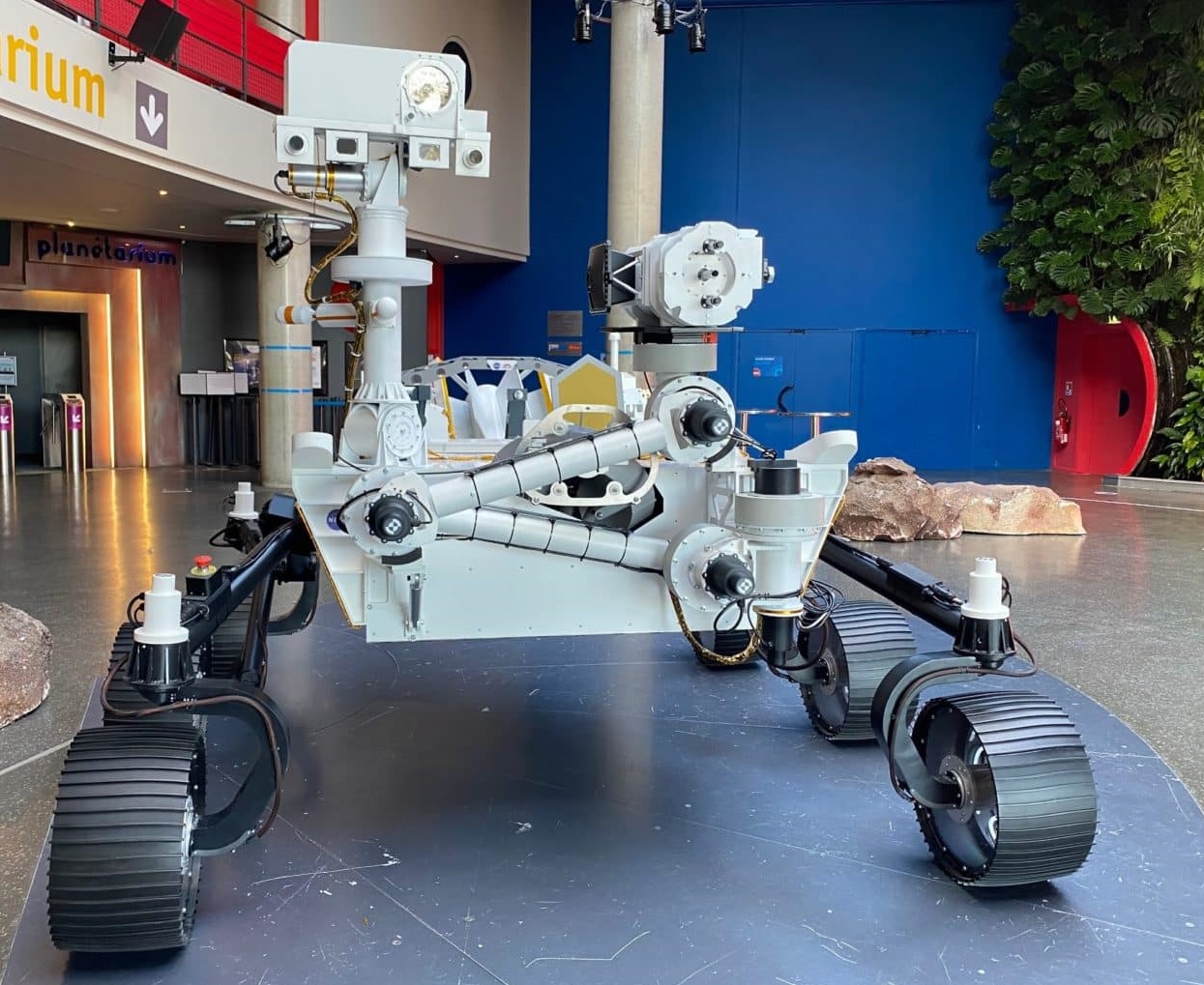
En collaboration avec la société Atelier de l’Insolite, nous avons eu le plaisir de mettre au point deux magnifiques répliques de rovers Martiens. Il s’agit de 2 maquettes robotisées à l’échelle 1:1 servant à mettre en perspective deux missions au sein de la Cité de l’Espace à Toulouse:
- le rover Perseverance de la mission MARS2020 de la NASA
- le rover Zhurong de la mission Tianwen-1 de la CNSA.


HFSM s’est concentré sur la partie électronique
Nous avons donc réalisé:
- l’architecture électronique,
- la conception des cartes électroniques basées sur la technologie CAN,
- la CAO mécaniques liées à l’électronique (boitiers, interfaces, jonctions),
- le sourcing,
- les câblages,
- l’intégration des différents équipements.
Une réalisation électronique spécifique
La taille du rover Perseverance nous a poussé à orienté notre architecture vers de la décentralisation. Il s’agit d’une certaine façon d’une voiture robotisée ce qui nous a poussé à nous rapprocher des technologies de l’automobile.

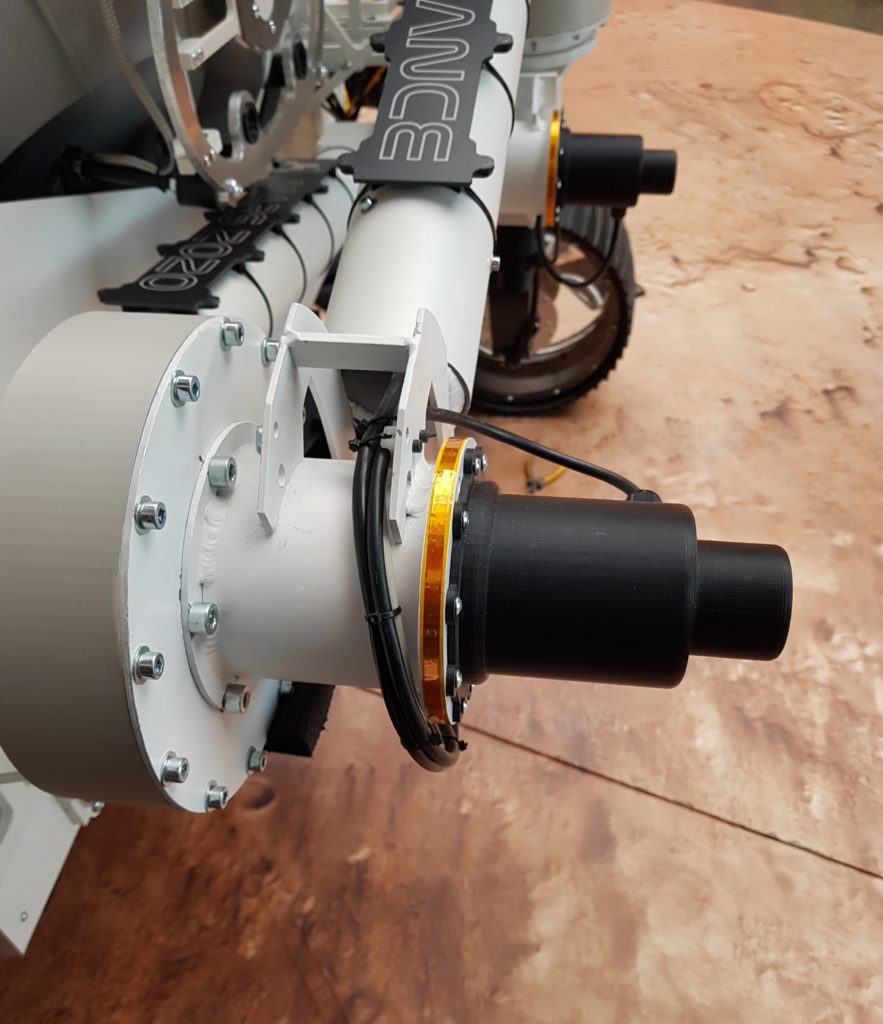
Chaque robot comprend deux trains de 3 roues orientables et motorisées. De plus, une série d’accessoires de démonstration tel qu’un bras 5 axes, des antennes, mats de caméra nécessitent un asservissement.
L’architecture est décentralisée avec une carte indépendante associé à une fonction. Par exemple: sur le rover Perseverance, nous comptons une totalité de 15 cartes sur le même réseau CAN ISO11898-3.
Les cartes peuvent asservir des moteurs DC en boucle fermée ainsi que des series de capteurs et autres actionneurs secondaires (laser, servomoteurs en Daisy-chain, solénoïdes, etc..)
Conception de cartes électroniques 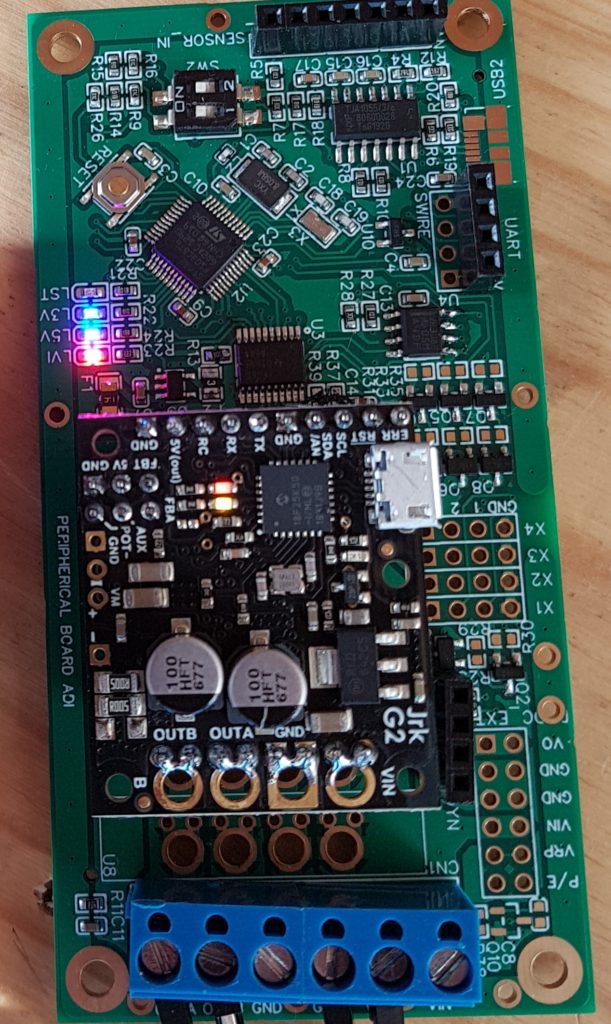
Test des cartes électroniques
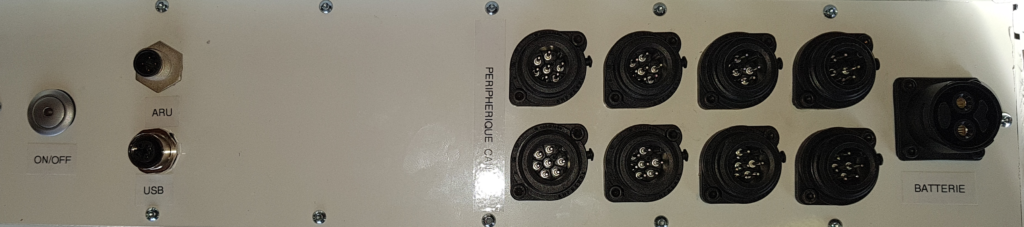
Afin de maximiser l’exploitation de ces maquettes, nous avons orienté notre architecture vers des blocs échangeables. En conséquent, les cartes électroniques sont standardisées et le boitier central (comprenant la gestion de puissance et l’ordinateur) est escamotable.
En effet, une des contraintes d’une telle réalisation est la vitesse et réactivité autour de la maintenance. Il est donc primordial de minimiser le temps de maintenance sur site.
D’autres contraintes spécifiques…
- l’environnement (pluies, canicules, froids, etc),
- la sécurité (des enfants peuvent tomber devant lors d’une manipulation autonome),
- l’esthétiques (le câblages interne est industriel mais le câblage extérieur et les boitiers d’apparats sont tous spécifiques).



En bref,
Ce projet est donc un bon exemple de réalisation électronique au carrefour du domaine de la muséographie et de la robotique.
Nous avons été ravi de mettre nos compétences au service de cet ambitieux projet.
Comments are closed